Note
The elementwise operations also exist for matrices and tensors. The elementwise multiplication is called the Hadamard product.
We assume you have read the reading material for this week prior to starting the tutorial. This tutorial covers basic terms in linear algebra and their implementation in NumPy and includes:
Define:
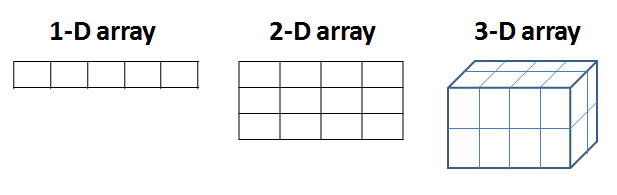
NumPy represents a vector as a 1-D array, a matrix as a 2-D array (array of arrays), and an $n$-tensor as a $n$-dimensional array (e.g. A 3D-tensor is an array of 2D arrays etc.):
The following cells demonstrates how to create Numpy arrays:
# Import the numpy lib
import numpy as np# Create a vector with 4 elements:
a = np.array([1, 6, 3, 1])
print(a)[1 6 3 1]
# Create a 2x4 matrix:
A = np.array([[1, 42, 6, 4], [2, 6, 87, 2]])
print(A)[[ 1 42 6 4] [ 2 6 87 2]]
# Print the size of the matrix
print(A.shape)(2, 4)
# A 2x2x4 tensor:
T = np.array([[[1, 23, 3, 4], [42, 6, 7, 87]], [[9, 3, 11, 2], [2, 22, 15, 101]]])
print(T)[[[ 1 23 3 4] [ 42 6 7 87]] [[ 9 3 11 2] [ 2 22 15 101]]]
# Print the size of the tensor
print(T.shape)(2, 2, 4)
A vector multiplied by a scalar:
a = np.array([3, 22, 3, 21])
a * 2Inner product (dot product): The inner product (see lecture slides for details) of two vectors $a$ and $b$ of dimension $n$:
$$ a\cdot b =\sum_i^N a_ib_i = a^\top b $$The inner product can be calculated using the Numpy function np.dot(a,b)
:
# Create 2 vectors v1 and b
a = np.array([1, 2, 3, 42])
b = np.array([2, 3, 4, 5])
# calculate the dot product
np.dot(a, b)Summation and subtraction of 2 vectors: Elementwise summation/subtraction/multiplication
# Create 2 vectors
a = np.array([1, 2, 3, 42])
b = np.array([2, 3, 4, 5])
print("a + b is : \n", a + b)
print("a - b is : \n", a - b)
print("a * b is : \n", a * b)a + b is : [ 3 5 7 47] a - b is : [-1 -1 -1 37] a * b is : [ 2 6 12 210]
The Euclidean distance (aka. $L2$-norm) of a vector $a$ is the square root of the inner product $$ |a| =\sqrt{\sum_i^N a_i^2 }= \sqrt{a^\top a} $$ , where $a^\top$ is the transpose of $a$.
# Inner product of v1 with itself
a_a_inner_product = np.dot(a, a)
Euc_len_a = np.sqrt(a_a_inner_product)
print('Euclidean distance of v1:', Euc_len_a)Euclidean distance of v1: 42.16633728461603
The Euclidean distance can be calculated using np.linalg.norm()
print('Euclidean distance of v1:', np.linalg.norm(a))Euclidean distance of v1: 42.16633728461603
Vectors $a$ and $b$ are considered orthogonal (perpendicular) if $ a^\top b=0$.
# Orthognonal vectors
a = np.array([1, -2, 4])
b = np.array([2, 5, 2])
print(a.dot(b)) # Alternative way to calculate dot product. Equivalent to (np.dot(a,b))0
Orthonormal vectors: are orthogonal and have unit length.
In the cell below, orthonormal vectors $a$ and $b$ are calculated by dividing each by their length to ensure orthogonality and normality.
a_normalized = a / np.linalg.norm(a)
print('a_normalized:', a_normalized)
b_normalized = b / np.linalg.norm(b)
print('b_normalized:', b_normalized)
# Inner product of orthonormal vectors
print('The inner product of a_normalized and b_normalized: \n', a_normalized.dot(b_normalized))a_normalized: [ 0.21821789 -0.43643578 0.87287156] b_normalized: [0.34815531 0.87038828 0.34815531] The inner product of a_normalized and b_normalized: 0.0
The following section provides an overview of important matrix properties and matrix compositions.
A Square matrix: is a two-dimensional array with the same number of rows and columns $N \times N$ .
# Create a square random matrix
A = np.random.randint(5, size=(3, 3))An Identity matrix is a square matrix that contains ones on the diagonal and zeros elsewhere.
The NumPy function np.identity(N)
creates an identity matrix with N elements on the diagonal.
I3 = np.identity(3)
print(I3)[[1. 0. 0.] [0. 1. 0.] [0. 0. 1.]]
I4 = np.identity(4)
print(I4)[[1. 0. 0. 0.] [0. 1. 0. 0.] [0. 0. 1. 0.] [0. 0. 0. 1.]]
Diagonal matrix: is a matrix with non-zero elements in the diagonal and zeroes elsewhere.
The NumPy function np.diag(a)
creates a 2D array (diagonal matrix) given a 1D array (list/vector containing diagonal elements) as input.
# Create an array:
v = np.array([3., 2., 5.])# Create a matrix with elements of v on the diagonal:
D = np.diag(v)
print(D)[[3. 0. 0.] [0. 2. 0.] [0. 0. 5.]]
Matrix multiplication of two matrices can be conceptualized as a series of consecutive inner products between corresponding row-column pairs.
Consider the matrices A1 and A2:
A1 = np.array([[1, 3, 0], [4, 4, 4]])
A2 = np.array([[2, 2], [0, 4], [2, 3]])In the following, matrix multiplication is demonstrated as a series of inner products. The cell below shows matrix multiplication of A1
and A2
using the dot
function in Numpy:
print(np.dot(A1, A2))[[ 2 14] [16 36]]
The first element ($2$) of the result is calculated as the inner product of the first row of A1
and the first column of A2
:
# A1 first row, A2 first column : position [1,1]
print(np.dot(A1[0, :], A2[:, 0]))2
Similarly, the other elements can be calculated using the appropriate combinations of rows A1
and columns in A2
:
# A1 second row, A2 first column : position [2,1]
print("A1 second row, A2 first column:", np.dot(A1[1, :], A2[:, 0]))
# A1 first row, A2 second column : position [1,2]
print("A1 first row, A2 second column:", np.dot(A1[0, :], A2[:, 1]))
# A1 second row, A2 second column : position [2,2]
print("A1 second row, A2 second column:", np.dot(A1[1, :], A2[:, 1]))A1 second row, A2 first column: 16 A1 first row, A2 second column: 14 A1 second row, A2 second column: 36
Multiplying a matrix A (from either left or right) with the identity matrix yields the matrix A. Thus, $$ AI = A = IA. $$ As an example:
# Create 3x3 matrix A with random values between 0 and 4.
A = np.random.randint(5, size=(3, 3))
# Create 3x3 identity matrix.
I = np.identity(3)
# Multiply the matrices
R = np.dot(A, I)
print("A:\n", A, "\nI:\n", I, "\nmultiplication result:\n", R)A: [[4 2 3] [1 0 1] [2 0 1]] I: [[1. 0. 0.] [0. 1. 0.] [0. 0. 1.]] multiplication result: [[4. 2. 3.] [1. 0. 1.] [2. 0. 1.]]
Matrix multiplication can be performed using the @
operator. The example below demonstrates that the use of the @
operator yields identical results as above:
R2 = A @ I
print(R2)[[4. 2. 3.] [1. 0. 1.] [2. 0. 1.]]
Recall that determinants are utilized when solving linear systems of equations, and a determinant of 0 indicates that the function does not have an inverse.
Use np.linalg.det()
to calculate the determinant of a matrix.
# Example matrices
A = np.array([[1, 1, 1], [0, 2, 5], [2, 5, -1]])
B = np.array([[0, 0, 0], [0, 2, 5], [2, 5, -1]])
# Calculate the determinant
print("det(A):", np.linalg.det(A))
print("det(B):", np.linalg.det(B))det(A): -21.0 det(B): 0.0
The function np.linalg.inv(A)
can be used to calculate the inverse of a matrix.
print("A^-1:", np.linalg.inv(A))
print("B^-1:", np.linalg.inv(B)) # This line should give an error because B is singularA^-1: [[ 1.28571429 -0.28571429 -0.14285714] [-0.47619048 0.14285714 0.23809524] [ 0.19047619 0.14285714 -0.0952381 ]]
The matrix A multiplied by its inverse yields the identity matrix:
I = np.dot(A, np.linalg.inv(A))
print(I)[[1. 0. 0.] [0. 1. 0.] [0. 0. 1.]]
# Create a diagonal matrix
A = np.diag([5, 2, 3])
print(A)[[5 0 0] [0 2 0] [0 0 3]]
The determinant of a diagonal matrix is the product of the elements on the diagonal.
print(np.linalg.det(A))29.99999999999999
The inverse of a diagonal matrix is the reciprocal of each element on the diagonal.
print(np.linalg.inv(A))[[0.2 0. 0. ] [0. 0.5 0. ] [0. 0. 0.33333333]]
This concludes the tutorial.